跳躍ロボットの構造
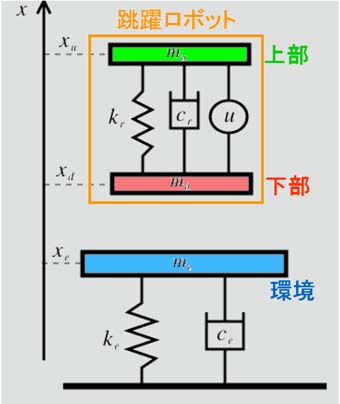
対象とするシステムは跳躍ロボットとトランポリン型の環境からなっています。
まず跳躍ロボットは、上部と下部がバネ・ダンパおよび直動型の入力部
で繋がれた2質量体で、鉛直方向にのみ動くことができます。
また、環境はバネ・ダンパで地面と繋がれた構造をしています。
座標については以下のように設定します。まず原点は、環境が単体で静止しているとき
その環境の高さとします。上部・下部・環境の座標は、ここで設定した原点0からの高さとし、
鉛直上向きを正とします。
なお、ロボットが環境から浮いている状態を飛遊相、ロボットが環境に接している状態を
立位相と呼ぶことにします。
また、このシステムには以下の2つの条件
- 衝突は完全非弾性衝突

があるものとします。1つ目の条件は衝突のダイナミクスの、
2つ目の条件はモード遷移のダイナミクスの簡略化を目的としています。
仮想コンプライアンスの導入
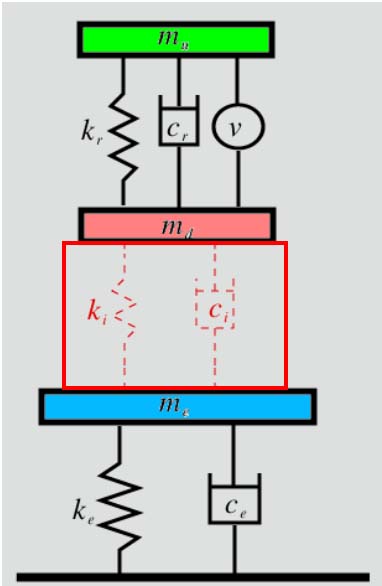
ロボットが環境に着陸するときの衝撃は、ロボットに対して
エネルギー効率の低下や機械的なダメージの発生等の悪影響を与えます。
そこで、飛遊相においてのみ
仮想コンプライアンスを導入することによる衝撃の低減を行います。
具体的には入力により、右の図に赤色で示したような仮想的なバネおよびダンパを
付加します。この仮想コンプライアンスを導入するために、入力部に

なる入力を付加することします。