2004JumpCOE
エネルギー保存制御によるロボットの定常跳躍
- 研究の背景と目的
跳躍・歩行のような高度な技能制御問題は、主に軌道計画および追従制御問題として
扱われています。この手法は軌道さえ得ることができれば実装は容易なのですが、反面、
ロバスト性および適用性が低いという欠点があります。
特に、跳躍ロボットにおいては、離着陸の前後で軌道が大きく変化するため、
この欠点は致命的になることがあります。
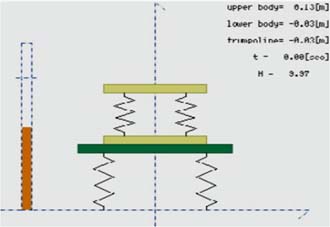
本研究ではこのような方法とは全く異なるアプローチとして、力学的エネルギーを
目標値に保持することにより間接的に周期的な跳躍運動を生成する手法を提案します。
この手法は軌道追従に基づく制御方法とは異なり、エネルギーのみを目標値に収束させる
という純粋な状態フィードバック制御となるため、環境の変化に対する適応性や
モデル化誤差などの不確定要素に対するロバスト性が高いという利点があります。
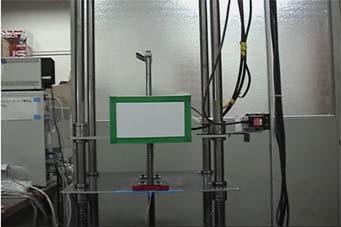
- 跳躍ロボットの紹介
- モデリング
- エネルギー保存制御
- ジャンプロボット関連の研究業績
- 現在の研究はこちら
(京都大学 情報学研究科 システム科学専攻 機械システム制御分野)