適応制御設計
|
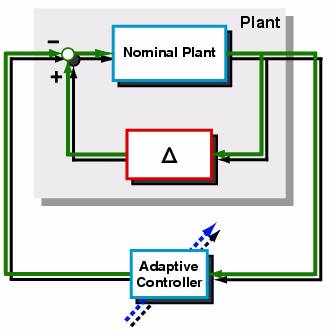
Block diagram of
adaptive control system |
- 研究の背景と目的
コントロールを必要とする力学のシステムのますます複雑で高度に不確かな性質に照らして、多くの高機能
の工学アプリケーションの信頼できるモデルが手に入らないであることは容易に想像できる。そのようなシステムの不確実性の下では、適応制御器はハイレベル
のモデリングエラーを許容し、システムパフォーマンスを改善することができるので、その有効性は明らかである。
この研究では、パラメーターの不確実性、外 乱 除去、飽和制約、ディジタル・インプリメンテーションを考慮した Lyapunov の手法に基づいた適応制御の枠組みを構築する。特に、次の研究トピックに取り組んでいる: 外乱を備えた非線形の不確かなシステムに対する適応制御; 非線形の不確かなシステム用のロバスト適応制御; アクチュエーターの飽和制約を備えた非線形の不確かなシステムに対する適応制御; 状態依存の不確実性を備えた非線形の行列セカンドオーダー(メカニカル)システムの適応制御。