で表される2次形式評価関数を最小にする安定化制御器を求める 問題を考える。 このとき、その最適値が制御対象の不安定極・零点やゲイン特性などの 制御対象の性質とどのように関わっているかを 理論的に解明するのが、「制御性能限界」の研究目的である。
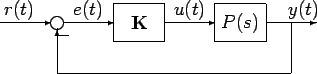
上記の評価関数の第1項目は追従誤差に関するペナルティーであり、
第2項目が制御入力に対する制約を表現している。
この問題は良く知られた ![]() 最適サーボ問題であるので、リカッチ方程式解や
LMI解に基づいて数値的に最適制御器を求めることは容易である。
ここで興味あるのは最適制御器を求めることではなく、最適値の解析解を与えることにより、
制御対象のどのような性質が達成可能な制御性能限界に関係しているかを
明らかにすることである。
最適サーボ問題であるので、リカッチ方程式解や
LMI解に基づいて数値的に最適制御器を求めることは容易である。
ここで興味あるのは最適制御器を求めることではなく、最適値の解析解を与えることにより、
制御対象のどのような性質が達成可能な制御性能限界に関係しているかを
明らかにすることである。