量子制御
|
|
|
|
- 研究の背景と目的
1990年初頭の量子情報技術の急激な発展に動機付けられ, 量子系の制御法の研究が本格的に始まった.実際,
量子情報技術の実現のためには対象の量子系を制御し,外乱下においても望ましい量子状態を準備する必要がある.とくに1993年に物理学者H.M.Wisemanによって,
量子系を連続的に測定し,測定データを用いて制御器を設計するフィードバック(FB)制御法がはじめて提案されてより,
その有効性が多くの研究において数値的に実証されてきた.さらに2003年に物理学者JM.Geremiaによって,
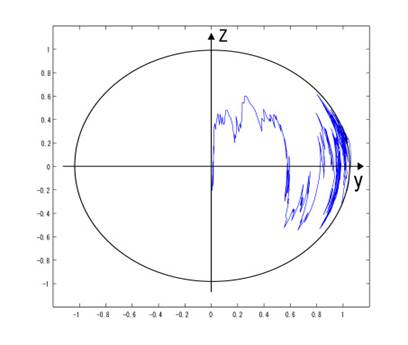
「スクイズド状態」なる重要な量子状態をFB法により生成する実験が示されたように,
FB法は実装可能な段階にある.
しかし従来の研究では, 制御器と測定器を伴う, 入出力をもつ動的システムとしての量子系つまり「動的量子システム」を解析する視点が欠けていた.そのため,
効果的なFB制御器の設計理論が存在せず, 実際, 従来の研究においてはアドホックなFB制御器のみが提案されてきた.一方で,
従来より制御理論は様々な一般的古典システムに対して, 有効な制御器の設計法を提供してきた.
本研究は, 可制御性解析、可観測性解析をはじめとする制御理論の数多くの概念を量子系に適用し, 量子系の制御系設計理論を構築することを目的とする.この研究は同時に「量子系はどれほど制御できるのか」,
「量子系を制御するために必要な情報量はどれほどか」といった, 本質的な問題を解くことを目的とする