磁気ヘッド位置決め機構/制御系設計への適用
有限周波数正実性条件に基づく統合化設計法をハードディスクドライブ(HDD)のスイングアーム位置決め機構(図1)の設計に適用した.
図1: Geometry of the swing-arm
このアームは,B点に力入力

が作用し,Aを支点として回転する.制御量はヘッドの位置C点の座標であり,観測出力として検出できるものとする.また,加工の際の誤差を考慮するため,重心位置

が

という形で変動するものとする.
アクチュエータの作用点Bを設計パラメータとして,有限周波数正実性条件に基づいて制御しやすいアームの構造を求めてみよう.
まず,重心位置の基準値が直線AC上にある場合を考えてみる.比較的低い周波数帯域

[rad/s]以下でR-FFPR条件を満たす領域を,定理2に基づいて

,

,

,

とセットして求めてみると,図2の影で表された部分にアクチュエータを配置すればよいことがわかる.実際には,B点をC点の近傍にもっていくことは物理的に不可能であるので,この場合は従来のアーム設計のように,アクチュエータが直線ACの延長線上で,A点の左側に配置すればよいことがわかる.
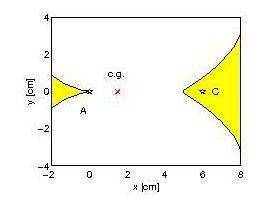
図2
では,この構造でどこまで制御帯域を上げることができるだろうか?この限界は,

を少しづつ大きくしていくことにより求めることができる.
を大きくしていくと,R-FFPR条件を満たす領域は小さくなっていき,ついにはA点の左側の領域が消滅する.例えば,図3は
[rad/s]のときの結果である.すなわち,このままの構造(従来型のまっすぐのアーム)では制御でいくらがんばったとしても
[rad/s] の制御帯域を得るのは難しい.
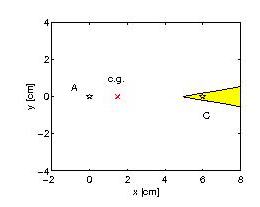
図3
そこで,重心位置が直線ACから離れたところにくるように設計してみる.このとき,
,

とセットして R-FFPR(

[rad/s])の条件を満たすアクチュータ配置可能領域を求めたのが図4である.
図3と異なりかなり広い領域に配置可能であることがわかる.例えば図4の□で示した点にアクチュエータが配置されている曲がった形状のアームは,より広い周波数帯域でロバスト有限周波数正実性条件を満たすので,従来のまっすぐのアームよりも制御帯域を広くとれることが期待できる.
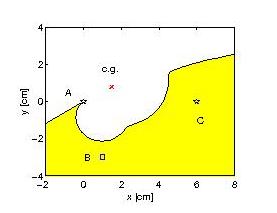
図4
このことを確認するために,構造を決めた後に追従誤差

の2ノルムを小さくする制御器を設計し,制御性能の比較を行ったところ,予想された通り曲がったアームの方が優れた制御性能が得られた.例えば,ステップ応答で
case1A: まっすぐのアーム(重心:直線AC上の点

)
case1B: まっすぐのアーム(重心:
から微小にズレ)
case2 A: 曲がったアーム(重心:直線ACから離れた点

)
case2B: 曲がったアーム (重心:

から微小にズレ)
の4つの比較をしたのが図5であり,曲がったアームが明らかに優れていることが確認できる.
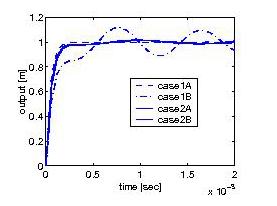
図5
トップページへ